
A volta dos músculos artificiais
Depois de progressos demasiadamente lentos com os robôs “duros”, feitos de metais e outros materiais rígidos, tudo acionado por motores, os engenheiros se voltaram para os “robôs macios”, muito mais moles e adaptáveis, que interagem com o ambiente e com os seres humanos de uma forma completamente diferente.
Por exemplo, robôs macios podem amortecer impactos da mesma forma que os membros humanos, ou agarrar objetos com delicadeza. E também há benefícios em relação ao consumo de energia: O movimento do robô hoje geralmente requer muita energia para manter uma posição, enquanto os sistemas flexíveis, imitando os biológicos, também podem armazenar a energia.
Foi então que uma linha de pesquisas já antiga se tornou novamente o centro das atenções: Os músculos artificiais, que essencialmente pegam o músculo humano como modelo e tentam recriá-lo, fazendo para os robôs macios o que os motores fazem para os robôs duros.
Existem vários tipos de músculos artificiais, mas uma categoria específica, muito promissora, tem ficado à margem dos progressos tecnológicos por exigir tensões elevadas demais: Os chamados atuadores eletrostáticos trabalham com tensões em torno de 6.000 a 10.000 volts. Isso significa que esses músculos artificiais precisam ser conectados a amplificadores grandes e de alta voltagem; eles não funcionam na água; e, bem, nenhum ser humano quer trabalhar ao lado de uma fonte de 10.0000 volts.
Stephan Gravert e colegas do Instituto Federal Suíço de Tecnologia (ETH) agora conseguiram melhorar muito essa tecnologia, tornando-a pela primeira vez viável tanto do ponto de vista energético quanto de segurança.
Garra robótica acionada pelos músculos artificiais eletrostáticos.
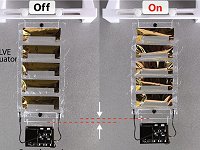
Atuadores eletrostáticos
A equipe chama seus novos músculos artificiais de atuadores HALVE, uma sigla em inglês para “eletrostático de baixa tensão amplificado hidraulicamente”.
“Em outros atuadores, os eletrodos estão na parte externa do invólucro. No nosso, o invólucro consiste em diferentes camadas. Pegamos um material ferroelétrico de alta permissividade, ou seja, um que pode armazenar quantidades relativamente grandes de energia elétrica, e o combinamos com uma camada de eletrodos. Em seguida, o revestimos com um invólucro de polímero que possui excelentes propriedades mecânicas e torna a bolsa mais estável,” explicou Gravert.
Isso significa que é possível reduzir a tensão necessária para o funcionamento do músculo artificial em quase 10 vezes, porque a permissividade muito maior do material ferroelétrico permite grandes forças apesar da tensão mais baixa.
O peixe robô apresentou uma aceleração impressionante.
Garra robótica e peixe-robô
Um dos protótipos desenvolvidos pela equipe é uma pinça de 11 centímetros de altura, com dois dedos. Cada dedo é movido por três músculos artificiais, contido em bolsas conectadas em série – este é o atuador HALVE. Uma pequena fonte de alimentação operada por bateria fornece até 900 volts ao robô.
Juntas, a bateria e a fonte de alimentação pesam apenas 15 gramas, e toda a garra, incluindo a eletrônica de potência e controle, pesa 45 gramas. A pinça consegue segurar um objeto de plástico liso com firmeza suficiente para suportar seu próprio peso conforme o objeto é levantado no ar.
O segundo protótipo é um veículo subaquático em forma de peixe, com quase 30 centímetros de comprimento, que pode se mover suavemente na água. Ele consiste em uma cabeça contendo a eletrônica e um corpo flexível contendo os atuadores HALVE. Esses atuadores se movem alternadamente em um ritmo que produz o movimento de natação. O peixe autônomo pode passar do estado estacionário a uma velocidade de três centímetros por segundo em 14 segundos – e isso na água normal da torneira.
O peixe robótico é particularmente interessante porque, até agora, não era razoável propor usar atuadores eletrostáticos em sistemas que devem funcionar dentro d’água e operados por baterias.
“Estes exemplos demonstram de modo excelente o quão pequenos, leves e eficientes são os atuadores HALVE. E também significa que demos um grande passo em direção ao nosso objetivo de criar sistemas integrados operados por músculos,” concluiu o professor Robert Katzschmann.
Fonte: Inovação Tecnológica
Deixe um Comentário